In my previous post, I was talking about Myrobotlab for the brain, and I want to explain a little bit more of what's going on. I have been searching for an easy to use software in order to control InMoov's servos. My goal was to be as open source as I could, so keeping my Arduino boards, and not to go into closed systems. Of course the choice is yours once you are building your robot. Through my search I read on different forums about Myrobotlab and this guy ,GroG, was the one who ruled it.
I had tried to use the software a few times, trying to figure stuff on my own, but I finally decided to contact him. And boy, what a help! The Gui still remains opaque to me, but since I had been fooling around with Arduino scripts since January, I was ready to jump into Python scripts. At my very low level of knowledge of course. GroG has been helping to figure out many problems I had with scripts but mainly has been working on creating a special service in his software for InMoov.
This means if you have printed let say the hand and forarm and set servos inside and you are looking for a way to control it, with that service you can. It allows you to test your servo's movements with sliders. If you have a microphone with your PC you can give voice commands to your servos. OpenCV should be easily installed when you install the software, that will allow you to control with it's own vision your robot.
There is Tutorials, and maybe some more coming up for easier understanding.
For the software to take control of the servos through the Arduino board:
-First download Myrobotlab. Here Get the last one on the bottom of the list.
-Unzip into your hard drive C:\
-Open the folder Myrobotlab in C:\ and double click on myrobotlab.bat
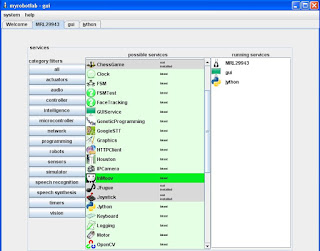
-Right click on InMoov's service and click "install"
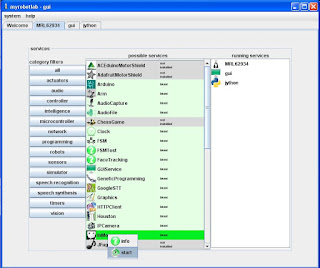
![]() -Start the Arduino service by right clicking on it and give it a name, for exemple: arduino1
-Start the Arduino service by right clicking on it and give it a name, for exemple: arduino1
![]()
-Choose in the Arduino tab, the type of board you have and which serial port it is connected to.
![]() -Then upload the script on to your board. (It seems that sometimes it doesn't work through the GUI, in that case copy click the script and upload it directly on your board using the Arduino.exe)
-Then upload the script on to your board. (It seems that sometimes it doesn't work through the GUI, in that case copy click the script and upload it directly on your board using the Arduino.exe)
![]()
-Start the service InMoov by right clicking on it and give it a name, for exemple: inmoov1
![]() -At this point the GUI will load all the servos and will attach them to your board.
-At this point the GUI will load all the servos and will attach them to your board.
If you click on the "thumbRight" tab you will have access to the slider of the thumb servo.
![]() Notice all the servos and two arduinos are now available in the tab bar.
Notice all the servos and two arduinos are now available in the tab bar.
This is for both arms, right and left + the head.
Ear tab is for giving voice commands, Mouth is for the robot to talk back.
OpenCV is if you have a camera set in the head. (Although those STL parts are not ready for downloads yet)
So now you have the base, it's up to you to play around, discover and there will be more to come according to GroG.
Following the tutorials might help you to go further.
Hope you have fun!
I had tried to use the software a few times, trying to figure stuff on my own, but I finally decided to contact him. And boy, what a help! The Gui still remains opaque to me, but since I had been fooling around with Arduino scripts since January, I was ready to jump into Python scripts. At my very low level of knowledge of course. GroG has been helping to figure out many problems I had with scripts but mainly has been working on creating a special service in his software for InMoov.
This means if you have printed let say the hand and forarm and set servos inside and you are looking for a way to control it, with that service you can. It allows you to test your servo's movements with sliders. If you have a microphone with your PC you can give voice commands to your servos. OpenCV should be easily installed when you install the software, that will allow you to control with it's own vision your robot.
There is Tutorials, and maybe some more coming up for easier understanding.
For the software to take control of the servos through the Arduino board:
-First download Myrobotlab. Here Get the last one on the bottom of the list.
-Unzip into your hard drive C:\
-Open the folder Myrobotlab in C:\ and double click on myrobotlab.bat
-Right click on InMoov's service and click "install"



-Start the service InMoov by right clicking on it and give it a name, for exemple: inmoov1
If you click on the "thumbRight" tab you will have access to the slider of the thumb servo.
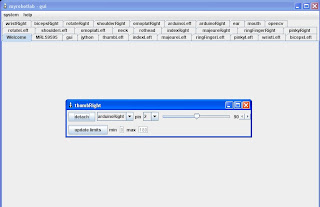
This is for both arms, right and left + the head.
Ear tab is for giving voice commands, Mouth is for the robot to talk back.
OpenCV is if you have a camera set in the head. (Although those STL parts are not ready for downloads yet)
So now you have the base, it's up to you to play around, discover and there will be more to come according to GroG.
Following the tutorials might help you to go further.
Hope you have fun!